
Radiobesturing
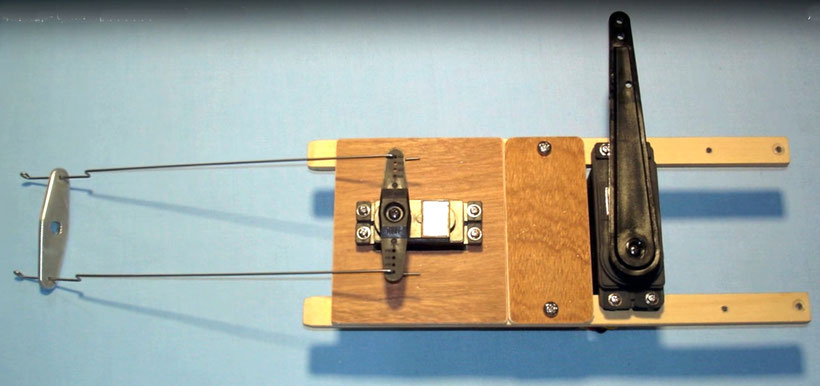
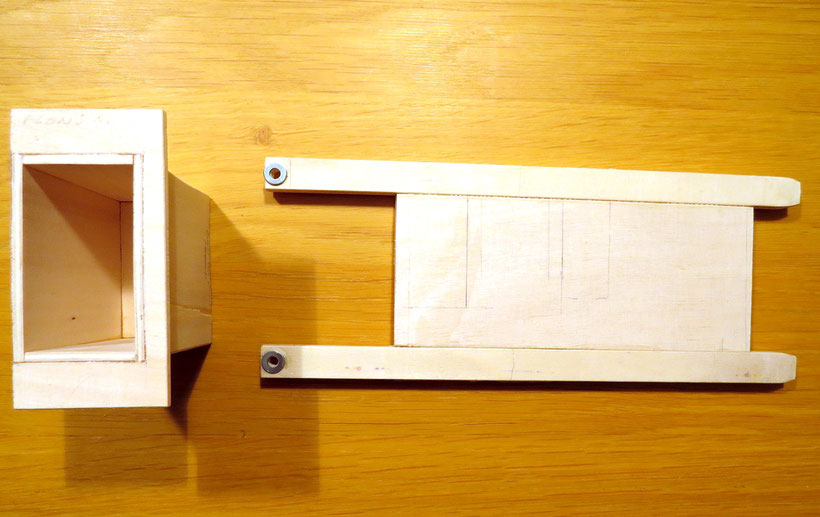
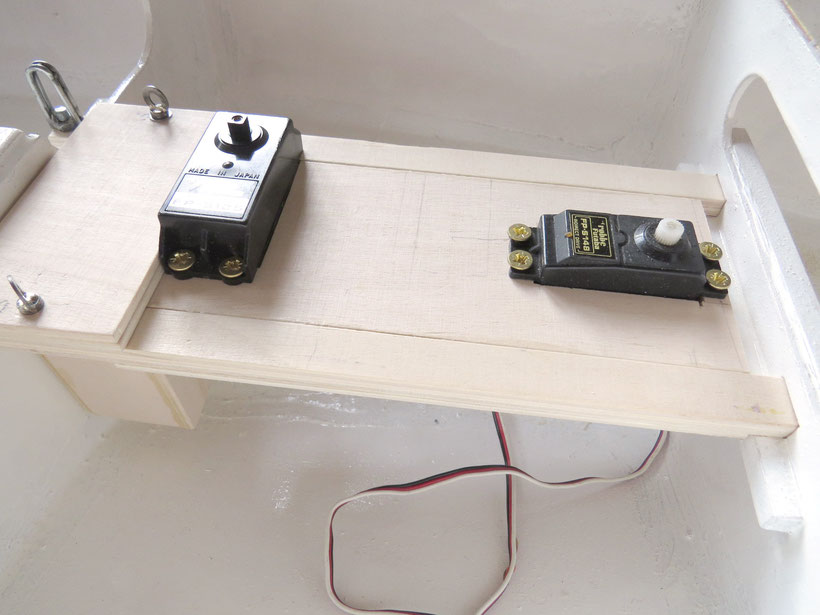
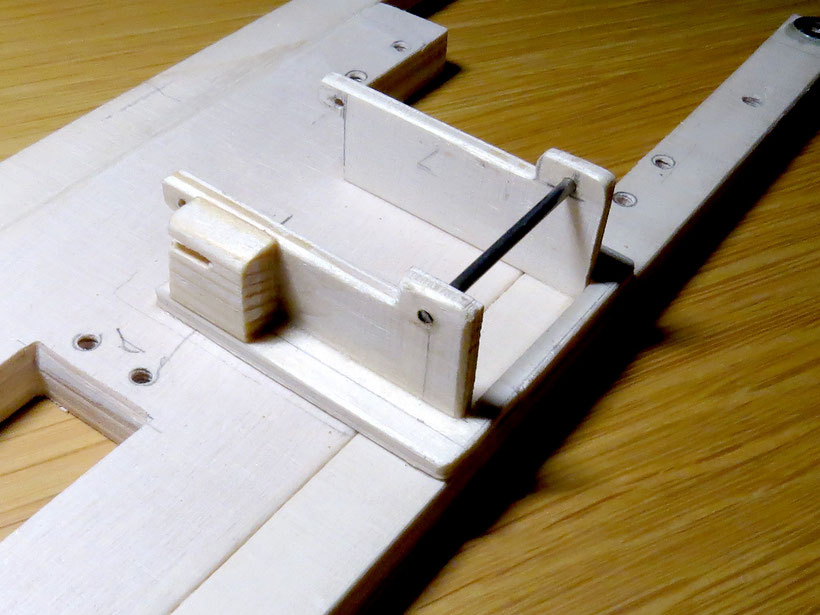
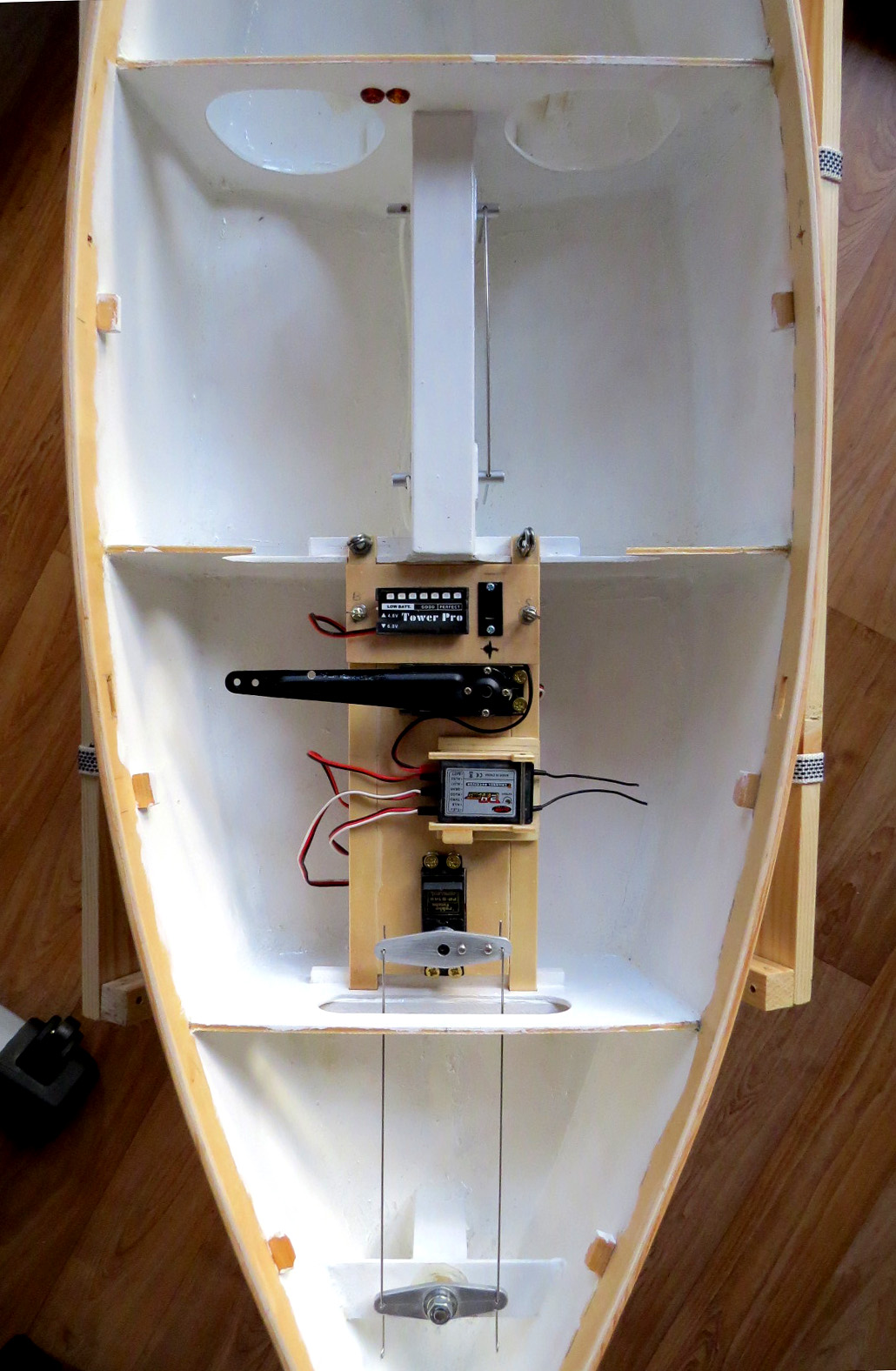
Zo gaat het geheel er straks ongeveer uit zien. Het wordt één module, waarin v.l.n.r. de stuurservo, de ontvanger, de zeilservo en de batterijhouder met schakelaar geplaatst zijn. (De batterijhouder is hier verwijderd, rechts van de zeilservo). Servo's zijn kleine, zeer krachtige elektromotortjes, die in dit geval zorgen voor de bediening van het roer en de grote met de arm erop, die de zeilen aantrekt of laat vieren. Deze module wordt bevestigd door beide lippen (links van de plaat uitstekend) in twee sleuven door een spant te steken en aan de andere zijde (rechts) met twee schroeven vast te zetten op een balkje op een andere spant. Zodoende is alles simpel even uit te nemen voor onderhoud o.i.d. Dit is ook te zien in de video: "RC Sailing Sloop 'Emma' - THE MOVIE".
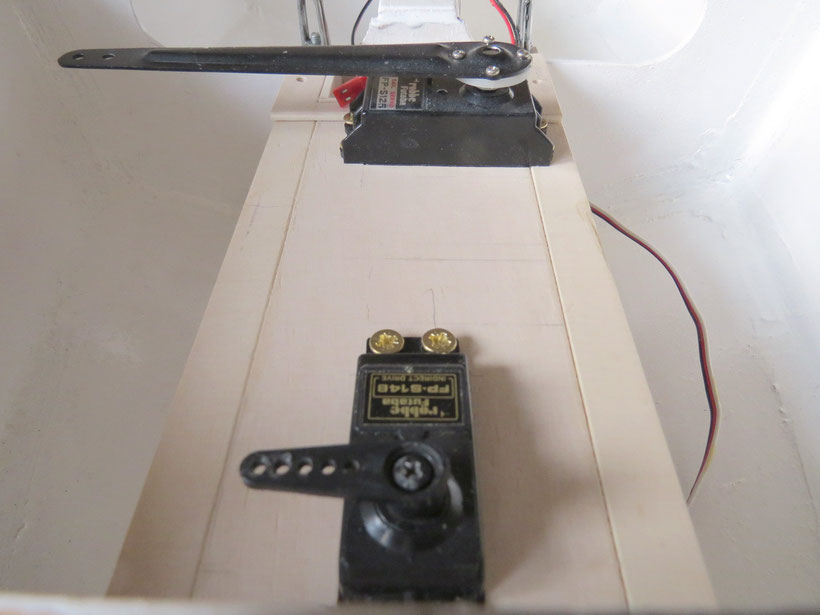
De twee stalen stangen links verbinden de hevel van de roerservo met een identieke hevel, die op de as van het roer gemonteerd wordt. Daardoor neemt het roer exact de bewegingen van de stuurservo over en kan er dus zeer secuur gestuurd worden. Op de foto boven is de hevel van het roer los gemaakt en hangt hij losjes aan de stuurstangen. Het totale unit hangt op veilige hoogte in de boot, zodat de kwetsbare electronica niet met eventueel binnengedrongen water in aanraking kan komen. Water in de boot kan altijd gebeuren, met regen of flinke golfslag, maar kan gemakkelijk weggezogen worden met een grote injectiespuit met slangetje.
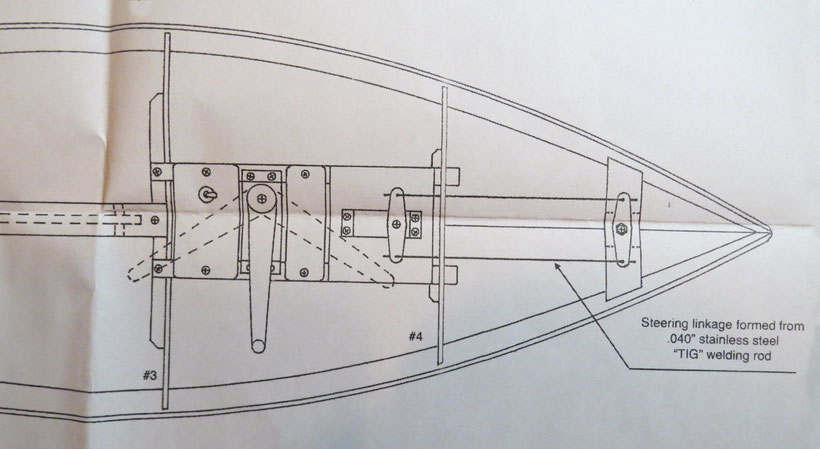
Allereerst de tekening van de hele radiobesturing-module, van boven gezien. Alles hangt achter de kielkast tussen spant #3 en #4, op veilige hoogte boven de bodem. De tekening is t.o.v. de foto bovenaan 180 graden omgedraaid.
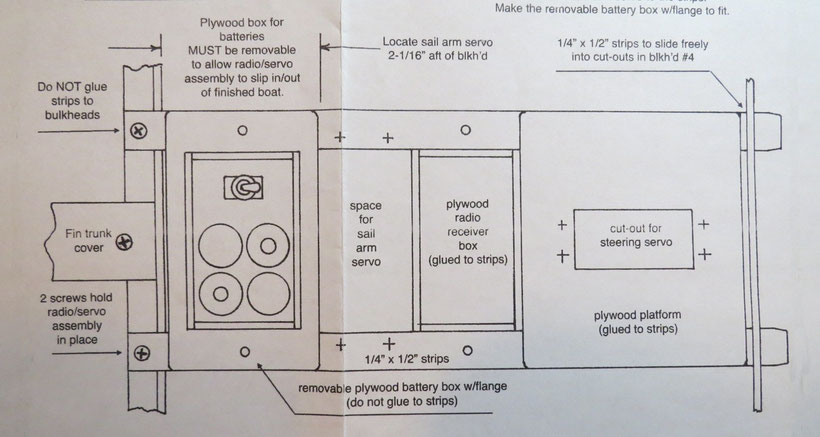
Hetzelfde bovenaanzicht, maar dan vergroot en gedetailleerder.
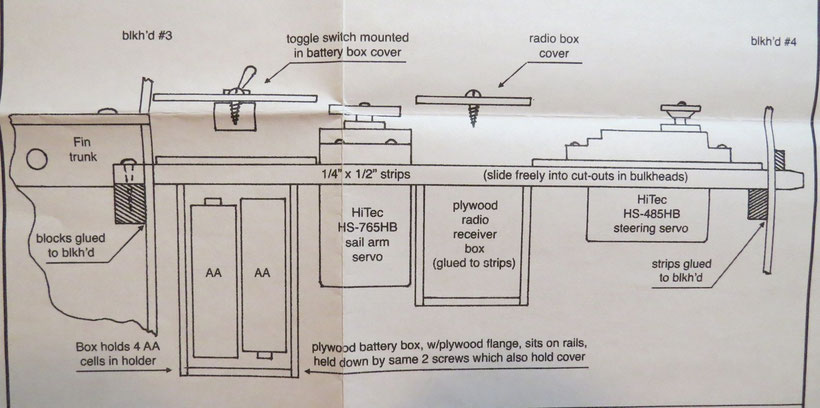
Nogmaals, in zij-aanzicht.
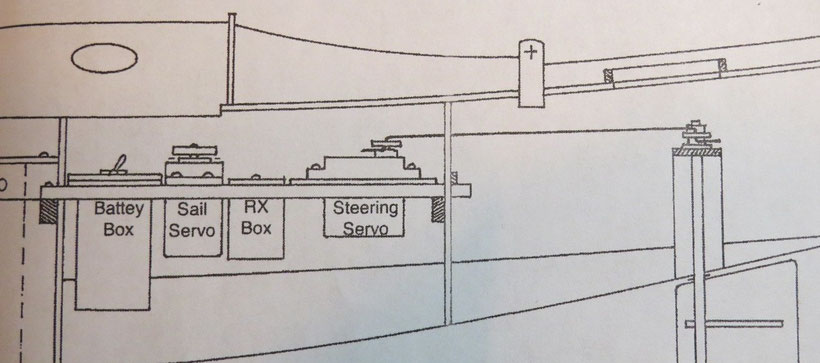
Het totale plaatje, inclusief de roerbesturing. Boven op het roer zit een zelfde hevel als op de stuurservo. Beide zijn verbonden met twee trek- en duwstangen van roestvrij staal. Hierdoor draait het roer gelijk met de stuurservo.
En nu de uitvoering . . .
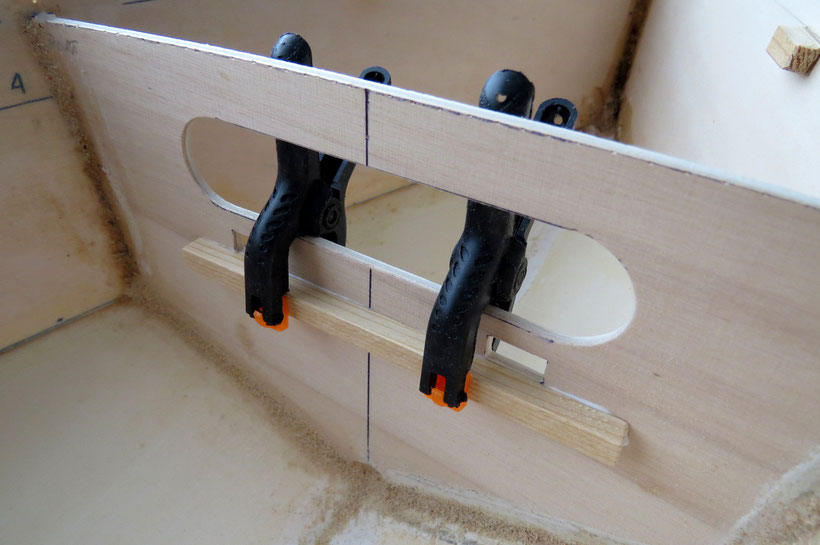
Allereerst moet ik de voorbereidingen gaan treffen voor de montage van de radiobesturing-module. Op het achterste spant (#4) worden twee balkjes gelijmd ter versteviging van de sleuven, waar de twee liggers in worden geschoven. Op deze liggers zijn alle onderdelen van de module bevestigd en alles kan door het losdraaien van twee boutjes bij spant #3 uit de boot gehaald worden. Eén balkje wordt op spant #4 tegen de voorzijde, ónder de liggers gelijmd . . .

. . . en het andere balkje komt aan de achterzijde, net bóven de liggers.
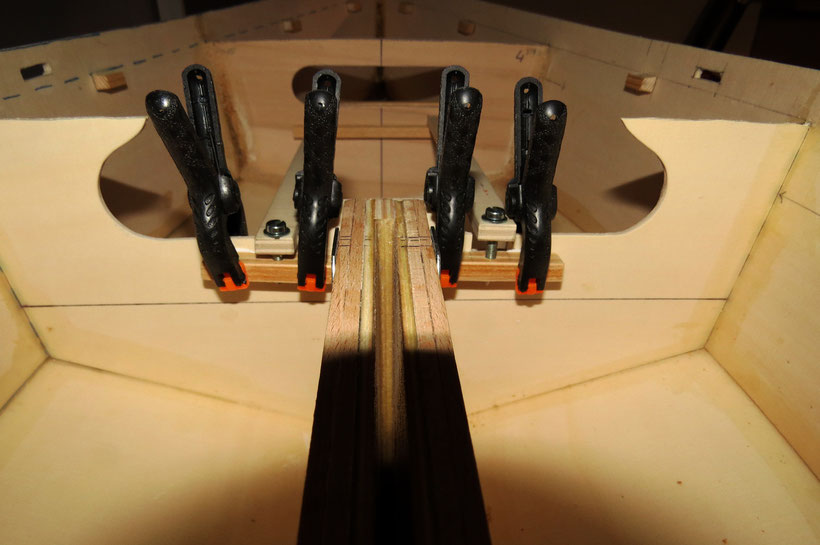
Tegen spant #3 worden aan de voorzijde ook twee korte balkjes gelijmd, waar ik de twee liggers van de radiobesturing op vast kan schroeven met boutjes. Aan de onderzijde zitten twee moeren vastgelijmd. Door beide boutjes los te schroeven kan ik de hele unit verwijderen. Aan het andere uiteinde steken beide liggers door de twee sleuven in spant #4. De horizontale potloodlijn die je boven ziet op spant #3 is de hoogte van de waterlijn.
<<<<<<<<<<<<<<<<<<<< O >>>>>>>>>>>>>>>>>>>>
We zijn intussen al weer enkele maanden verder met de bouw en alle elektronica gaat nu zijn plaats krijgen.

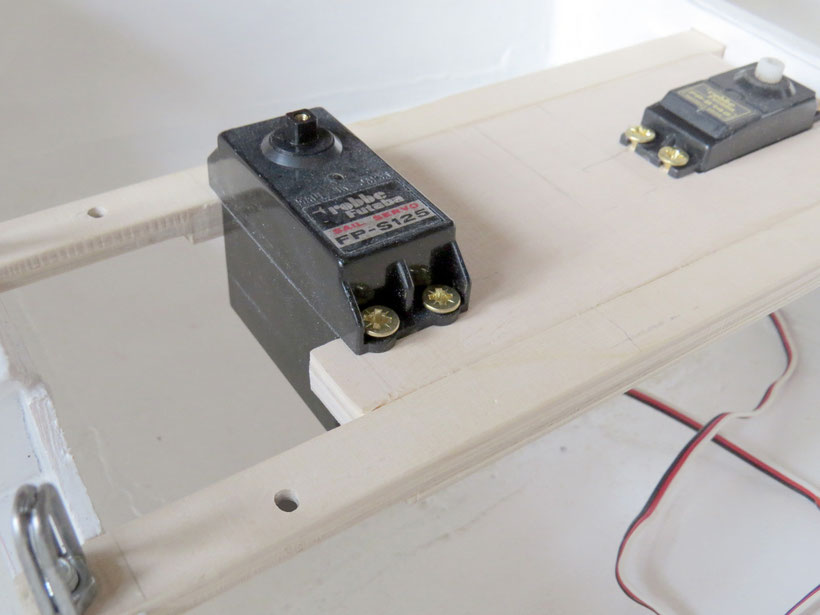
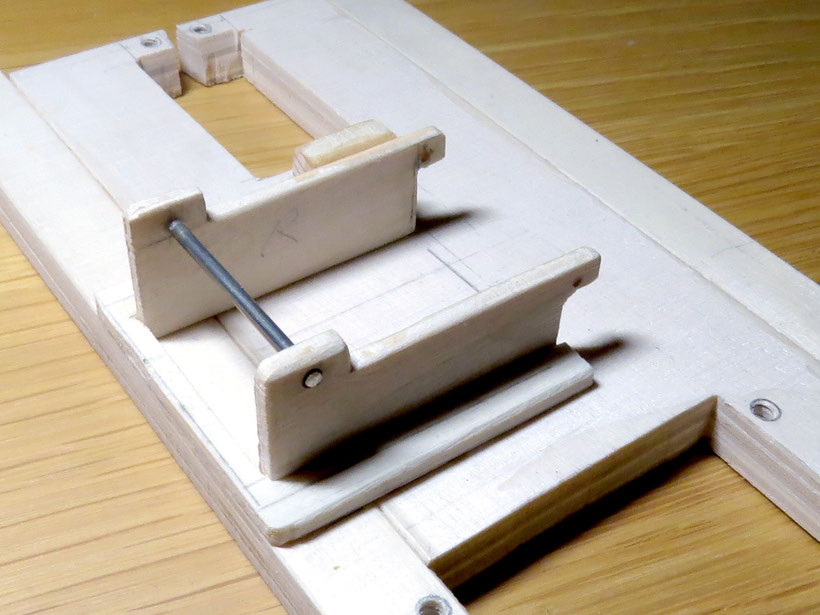
Helemaal bovenaan: Tussen beide balkjes, die alle apparatuur moeten gaan dragen, zit nu een houten tussenplaat. Daarin ga ik twee rechthoekige gaten zagen, waar de beide servomotoren in kunnen zakken, zodat ze op precies de goede hoogte zitten. De bevestigingsbouten heb ik omgedraaid, zodat de beide moeren nu boven zitten. Hiervan heb ik geïmproviseerde vleugelmoeren' gemaakt, zodat ze wat gemakkelijker zijn te hanteren.

Zo zijn ze snel losgedraaid, als de unit er een keer uit moet en heb je er geen gereedschap voor nodig.

Waar grote stalen gordijnhaken al niet goed voor zijn...
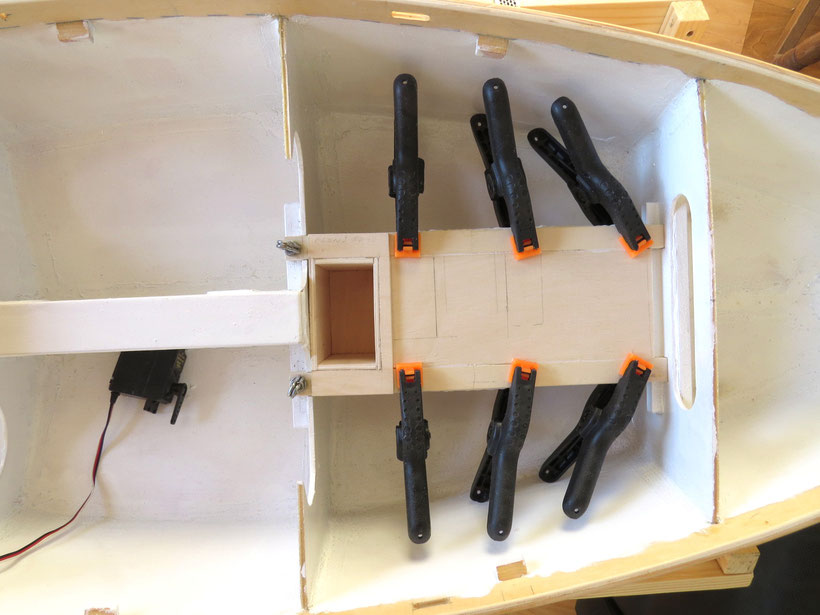
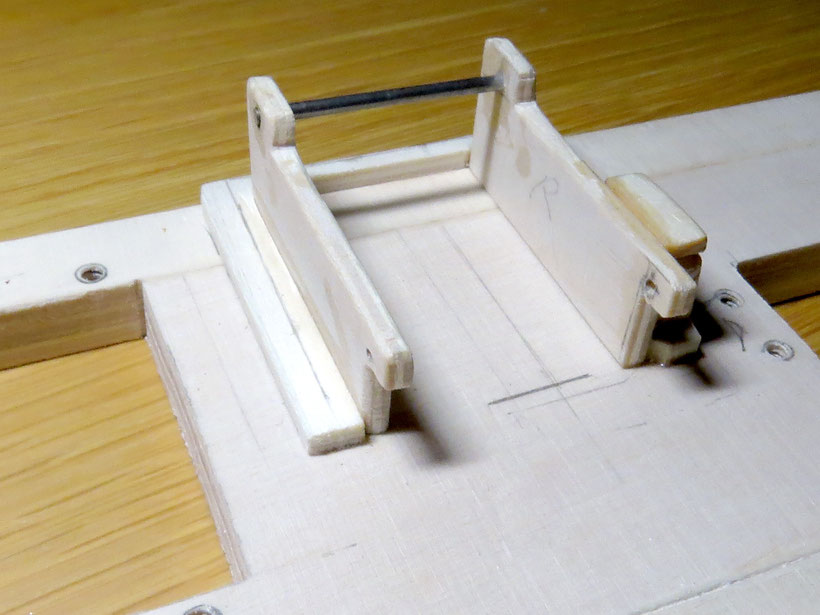
Het open bakje helemaal links is uitneembaar. Door het wegnemen hiervan ontstaat er voldoende ruimte om de unit een beetje op te tillen, van de schroeven af en naar links te schuiven, zodat beide eindlippen rechts uit spant #4 getrokken kunnen worden.
In het losse bakje komen de vier batterijen voor de voeding van de twee servo's en de ontvanger. Rechts ervan komt de rechthoekige opening voor de zeilservo, daarnaast komt de ontvanger en helemaal rechts aan het andere eind krijgt de roerservo zijn plek. Verder komt er nog een controlepaneeltje met leds, dat de conditie van de batterijen controleert en tenslotte moet ik nog ergens een goed bereikbaar plekje vinden voor de aan-en-uitschakelaar van het hele systeem. Waarschijnlijk ga ik deze schakelaar boven de batterijen monteren.
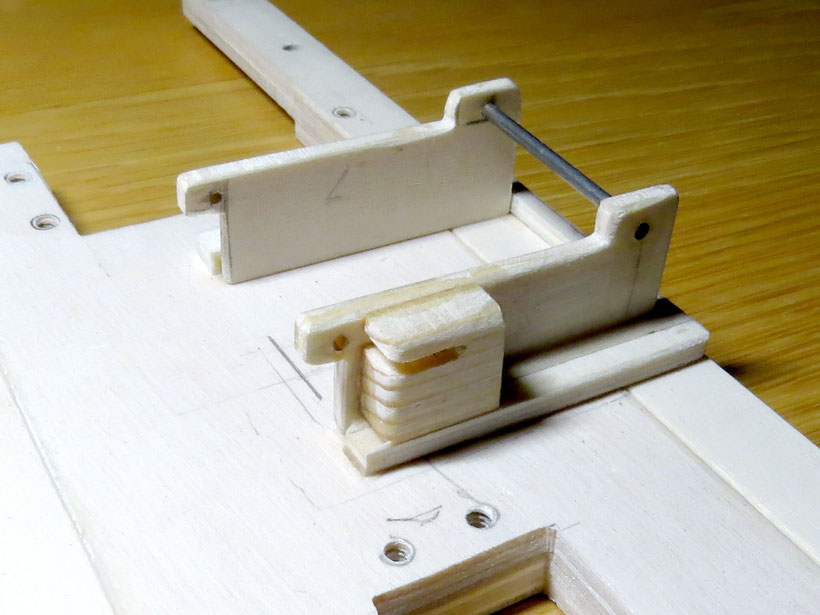
Voor de zeilservo is een uitsparing gemaakt, omdat deze zijdelings ingeschoven moet worden. Dit wordt later weer afgesloten als de bak voor de batterijen links ervan wordt gemonteerd. Beide hevels zijn van de servo's verwijderd.
Alle componenten, de twee servo's en de ontvanger zijn niet nieuw, maar ooit eerder gebruikt in een vorige zeilboot.

De bak voor de batterijen zit nu op zijn plaats. Er boven op ligt de batterijhouder, die rechtstandig wordt geplaatst. De 4 AA-batterijen van 1,2 Volt zijn in serie geschakeld en leveren samen 4,8 Volt, wat voldoende is om beide servo's plus ontvanger een aantal uren hun werk te laten doen. Zeg maar, genoeg voor een middagje lekker zeilen.
De batterijhouder staat op zijn plaats. De lange arm van de zeilservo heeft normaal gesproken voldoende uitslag naar voor en naar achter om de zeilen te kunnen vieren en inhalen. Dit kan later altijd nog wat bijgesteld worden.
Een iets duidelijker zij-aanzicht. De batterijen liggen niet boven op het paneel maar hangen er onder, om zo het zwaartepunt naar beneden te verplaatsen en meer naar de kiel toe. Dit is gunstiger voor de stabiliteit van de boot.

Het bakje wordt afgesloten met een dekplaatje en vastgezet met twee boutjes, die aan de onderzijde grijpen in twee ingelijmde moeren. In de gleuf van de kop heb ik met de gasbrander een revet gesoldeerd met zilver hardsoldeer.


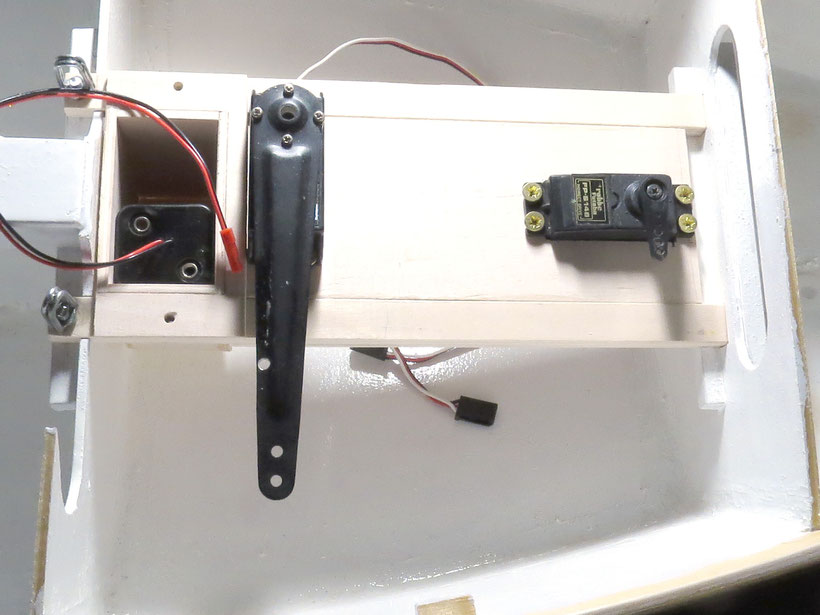
Dit is tot nu toe de indeling. In het midden is nog plaats genoeg voor de ontvanger.

De zeilservo zonder zeilarm. Niet nieuw meer; komt uit een vorige boot. Let maar even niet op het stof; komt goed!

De gemonteerde zeilarm. Deze wordt op de vierkante nok geschroefd, die boven op de servo zit.

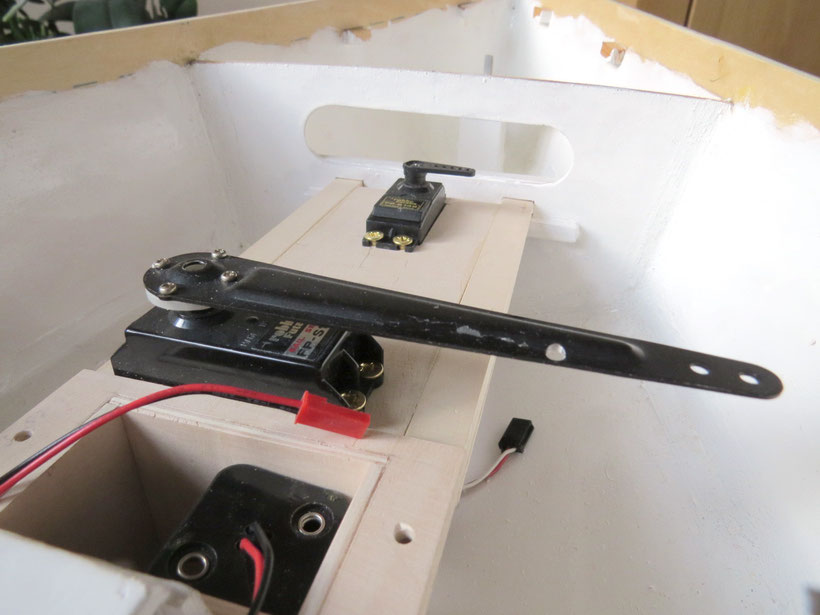
Voor de roerservo geldt ongeveer hetzelfde, alleen zit de hevel hier op een hoge tandas en is zo fijner af te stellen.
Op de halve hevel van de roerservo wordt een héle hevel geschroefd, die gelijk is aan de hevel, die op het roer zit.

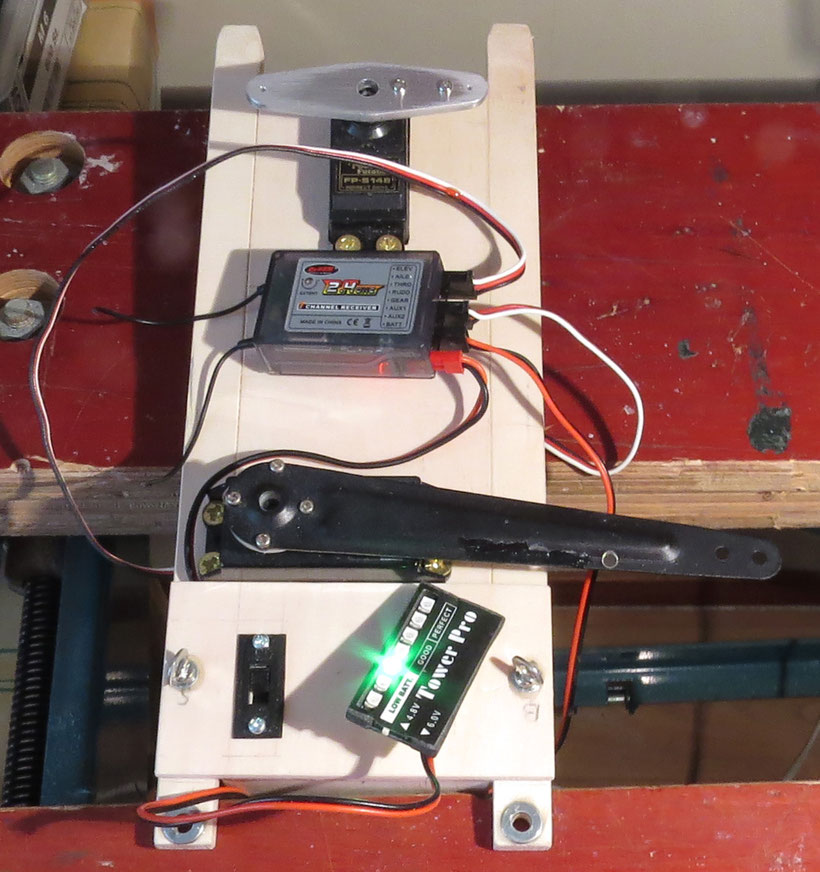
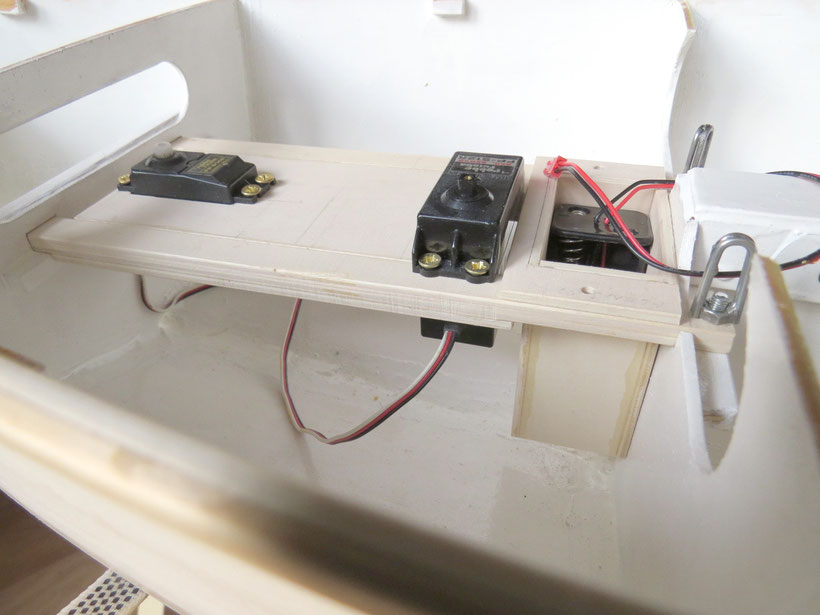
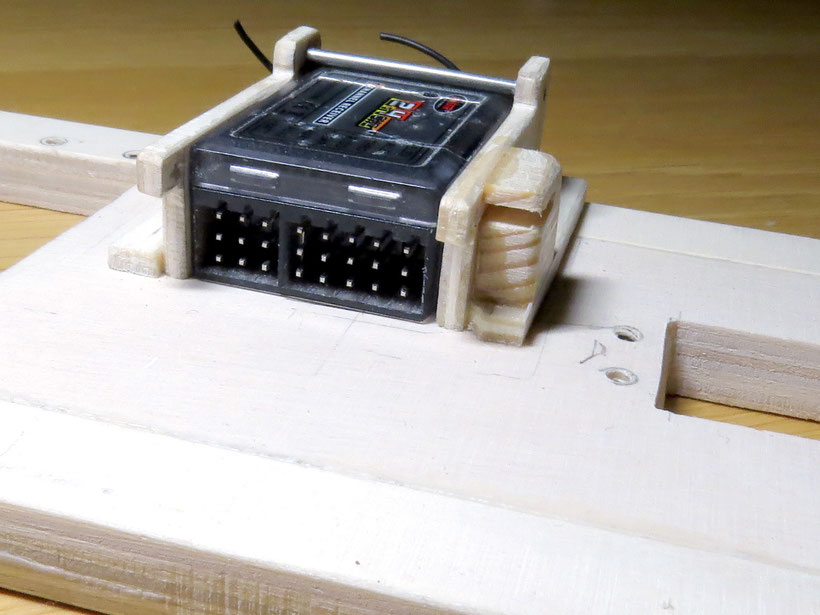
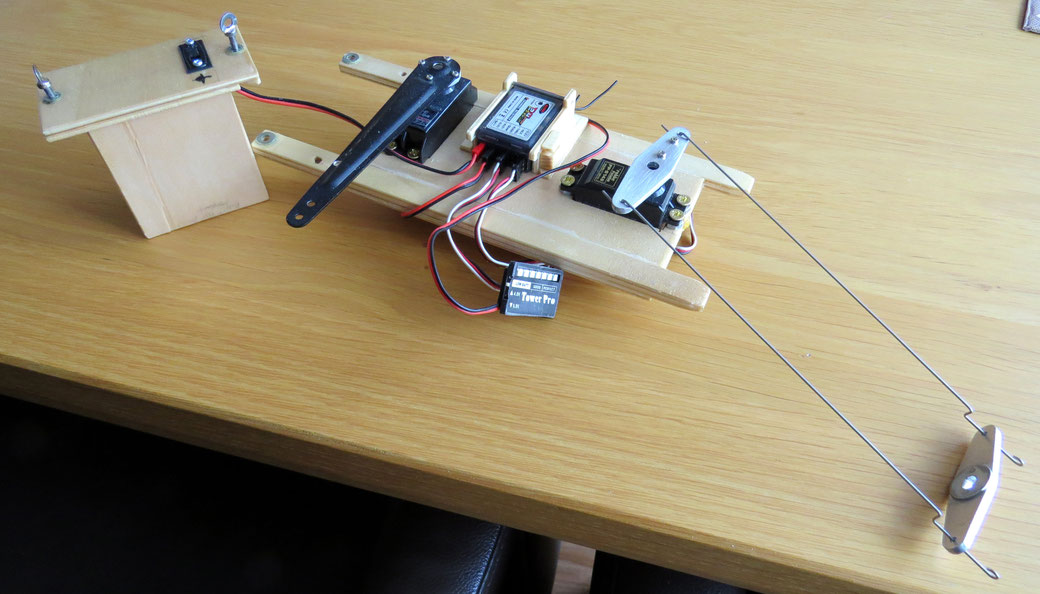
De apparatuur wordt nu getest in een proefopstelling. De zeil- en roerservo en het bakje met de batterijen zijn gemonteerd en werken naar behoren. Het controlepaneeltje voor de batterijen, met de groene leds naast de hoofdschakelaar wordt later na het aflakken vastgekleefd. De ontvanger met alle ingeplugde kabels ligt ook nog los, maar inmiddels heb ik er een houder voor gemaakt en die lijm ik vast tussen beide servo's in. Alle loshangende kabels worden in een later stadium nog beter weggewerkt.

De houder voor de ontvanger is met een ijzeren blok verzwaard tijdens het drogen van de lijm.
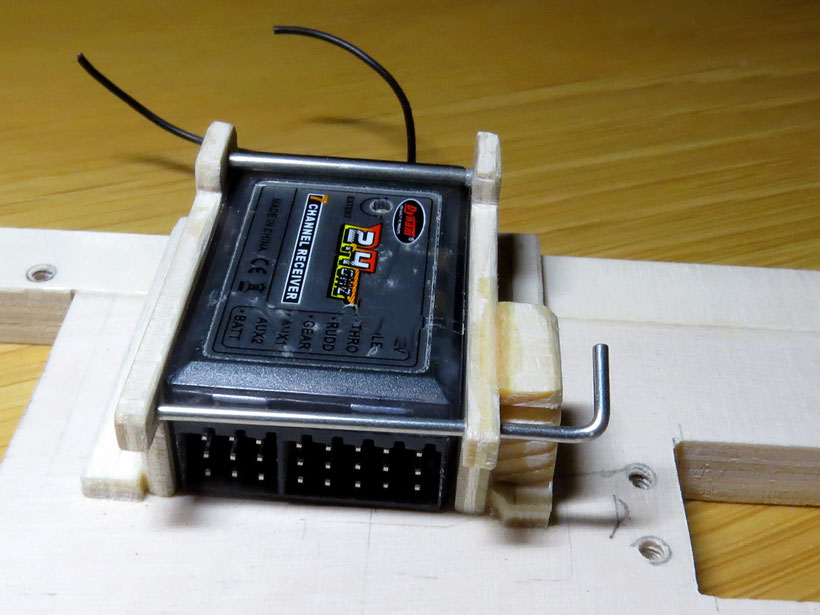
De ontvanger wordt ingesloten door twee zijwandjes en aan de rechterzijde door een lage rand langs de bodem.
Aan de bovenzijde wordt hij neergedrukt door een 2 mm. stalen pen.
De andere kant heeft twee gaatjes, waardoor een tweede stalen stift loopt, die verwijderd kan worden.
Het blokje aan de zijkant heeft een sleuf, waar de stift in valt, zodat zij niet kan draaien en eventueel los raken.
De ontvanger past perfect.
De stalen borgpen wordt aangebracht.
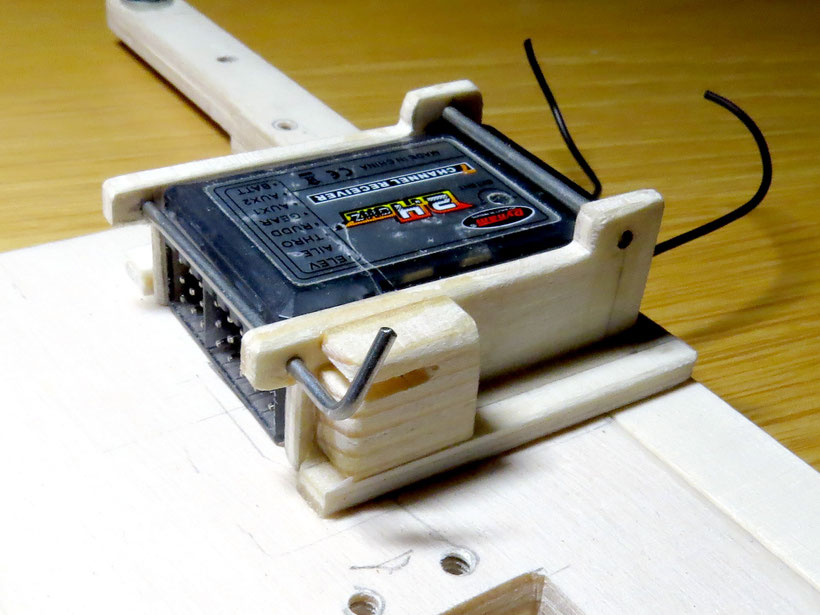
Éven aandrukken . . .

... en de boel zit op slot.
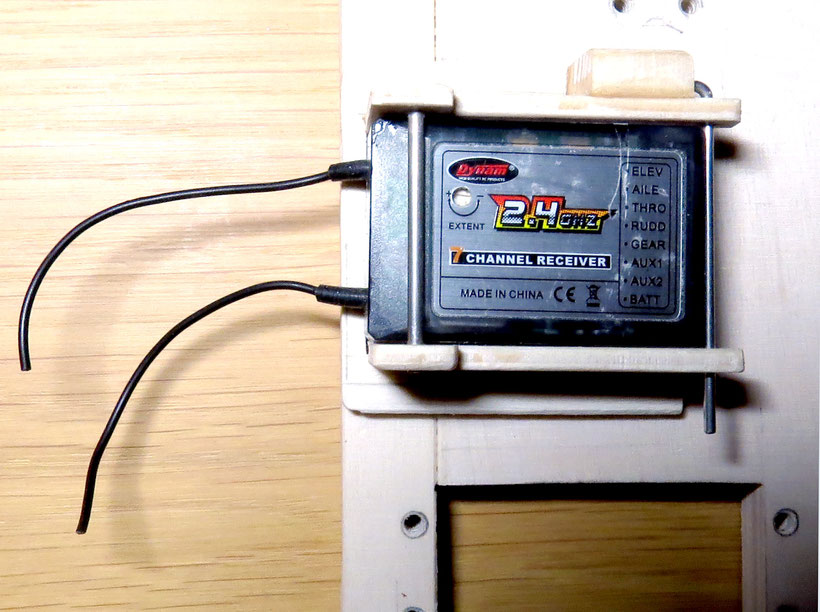
De aansluitingen rechts in de ontvanger, die ik ga gebruiken, van onder naar boven:
BATT - Hier worden de batterijen op aangesloten.
AUX1 en AUX2 - In een van beide wordt het controlepaneeltje voor de batterijen geplugd; maakt niet uit welke.
RUDD - Voor de servo van het roer.
ELEV - Voor de servo van de zeilen.
De andere worden niet gebruikt in mijn geval.
Twee korte antennekabeltjes zijn voldoende voor een uitmuntende ontvangst.

De radiobesturing is nu klaar, wat het roer betreft. Het enige wat nog gerealiseerd moet worden is de bediening van de zeilen.
Zoals je ziet zitten er in de lange arm van de zeilservo een aantal gaatjes. Hierin worden de uiteinden van de schoten gehaakt. In het gaatje helemaal op het uiterste einde links komt de schoot van het grootzeil en die loopt naar voor door de linker spantdoorvoer en van daaruit schuin omhoog door het dek heen naar een U-oog in de mast. Het grotere gaatje rechts, bijna in het midden van de arm is voor de fokkeschoot. Deze gaat via de rechter doorvoer in het spant linea recta naar de U-ogen voor in de boot en via de dekdoorvoer omhoog naar de fok. Beide zeilen worden hiermee tegelijk bediend. Als de zeilarm zich naar het roer toe beweegt, worden de zeilen aangehaald; draait de arm naar voren, dan worden beide zeilen gevierd en draaien ze naar buiten.
Het hart van de boot, even verwijderd. Zo kun je gemakkelijk overal bij, als je iets wilt aanpassen. Beter dan alles vast inbouwen!

Om in het binnenste te komen, is er wat werk aan de winkel. Het dak van de kajuit moet er eerst af. Dat kan, door de rechthoekige U-haak onder het dakluik te verwijderen. Hierdoor komt het dak los en kan er uit getild worden. Aan de voorzijde zit het geborgd met twee steekpennen door de voorwand.

Na het openen zie je links beide schoten lopen, via de twee doorvoeren door spant #2, naar de zeilen toe.

De bekabeling is nog een rommeltje, maar dat gaat goed komen.
Ónderaan de zeilservo met de lange zeilarm.
